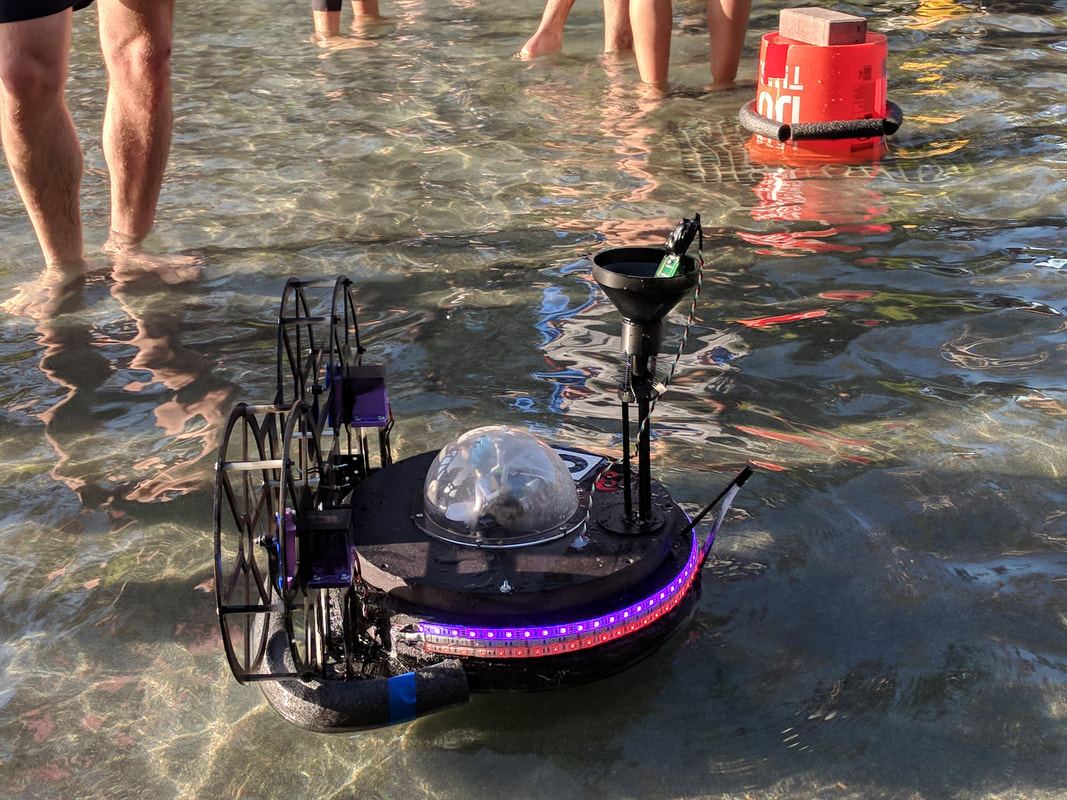
I worked on this project with 3 other graduate students as part of the Stanford mechatronics depth coursework (ME 218C). The task was to build in under 4 weeks a remote controlled boat that operated on a custom, class-designed XBee radio protocol. Our design consisted of a remote gun equipped with a pressure sensor for throttle, an IMU to determine throttle direction, LCD screen to display relevant pairing information, and various buttons and knobs for smaller features. The objective of the project was for every team to design a ship and remote that is compatible with class radio protocol, so during game play a remote could take over any other team’s ship when certain objectives were met (e.g. filling another ship’s water tank).
My responsibilities included coding most of the firmware for the boat and the driver for the LCD screen. I also designed most of the electronics for the boat in order to operate the fan motors, pump, lighting, and various water sensor and communication modules.
For a more detailed technical overview, please visit our project page.